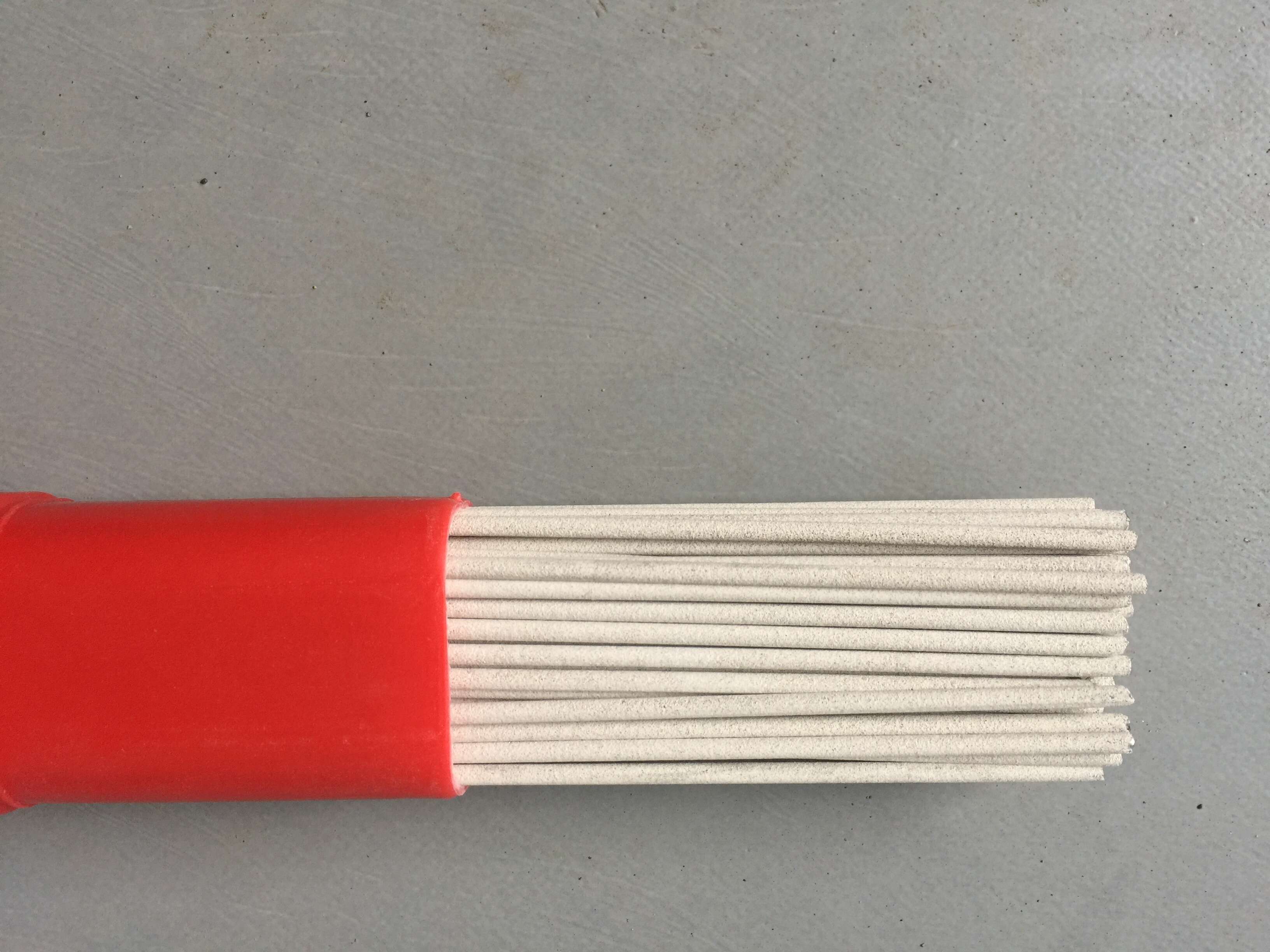
- 清河县汉龙焊接材料有限公司主营产品:合金焊条,碳化钨焊丝,不锈钢药芯焊丝,堆焊耐磨合金药芯焊丝

- 全国服务咨询热线
13932952879
清河县汉龙焊接材料有限公司生产合金焊条,碳化钨焊丝,不锈钢药芯焊丝,堆焊耐磨合金药芯焊丝等产品,欢迎在线咨询!
 清河县汉龙焊接材料有限公司
清河县汉龙焊接材料有限公司
从控制系统结构来看,由焊缝偏差信号传感及其提取、纠偏控制算法、跟踪执行机构组成的高铬铸铁药芯焊丝埋弧焊跟踪系统是以电弧(焊炬)相对于焊缝(坡口)中心位置的偏差作为被调量,焊炬位移量为操作量的闭环控制系统。在整个闭环控制系统中关键部分是传感器。传感器是能感受规定的被测量并能转换成可用信号,实现信息的检测、转换和传输的器件或装置。发达国家弧焊传感器有80%以上是用于焊缝跟踪的,目前用于焊缝跟踪的较多是直接电弧式、机械接触式和非接触式三种。
较初对埋弧焊进行焊缝跟踪实验时采用的传感器就是一种接触式传感器,其中,探头式接触传感器以导杆或导轮在焊炬前方探测焊缝位置
[2]。这种方法结构简单、操作直接、维修方便且不怕电弧的磁、光、烟尘、飞溅等干扰,是人们很容易想到的方法。探头式跟踪系统中传感器与埋弧焊小车上的机头联成刚性一体,传感器的探头与高铬铸铁药芯焊丝在同一焊缝内,传感器的探头直接与焊缝坡口接触,直接对偏差进行检测,可进行水平横向调节和高度垂直方向调节。如果高铬铸铁药芯焊丝偏离焊道或者高铬铸铁药芯焊丝伸出长度变化过大,传感器则发出相应的电信号,通过控制箱驱动对应的步进电机,使高铬铸铁药芯焊丝的偏离减少或者消除。但这种方法在焊接厚板锅炉压力容器时则暴露出其无法避免的缺点,因为在焊接圆筒状压力容器时,事先要将工件点固,这样在焊道中就存在点固焊焊点,传感器运行过程中若触头遇到点固焊焊点时,就会发生阻塞,此时需要外界干预才能继续施焊,影响了焊接效率。在筒体安装时会出现程度不等的不平、不齐等现象,有时或多或少存在着椭圆度,导致在筒体环缝的施焊过程中筒体发生轴向移动和较高点变化。靠模式跟踪系统很好地解决了这个问题
[3]。靠模法利用同步运动原理,系统由横向跟踪机构、纵向跟踪机构和微调机构三部分调节机构组成,横向跟踪机构通过靠轮、滑轨带动机头向右同步运动,弹簧始终使靠轮紧靠筒体;纵向跟踪机构的万向轮始终接触筒体,机头通过滑轨靠机头与滑轨的自重随筒体做上、下同步运动,保持导电嘴与焊缝之间距离不变,实现了环缝焊接自动化。这种传感器比较便宜,但有时会因坡口及焊缝的加工装配不均匀影响传感的测量精度和焊接质量。
非接触式跟踪系统克服了接触式跟踪系统的不足,光电传感式跟踪系统将感应器所感应到的光信号转换为电信号来实现跟踪。如有一种光电感应式跟踪系统,用焊缝附近专用白漆喷涂的一条带状线作为导向线,跟踪系统以导向线为基准自动调整感应器的旋转角度来实现跟踪。此方法解决了接触式跟踪系统受阻的问题,但是需要在高铬铸铁药芯焊丝焊接前喷涂一道白线,当焊缝有弯曲时,白线和焊缝不能保持相同距离,即与基准线存在偏差,这样就影响了焊缝的跟踪精度
[5]。超声波式跟踪系统是一种新型的非接触式跟踪系统[6],它利用发射出的超声波在金属内传播时在界面产生反射的原理,由超声波传感器接收反射波,根据入射-反射波脉冲的行程,测量界面的位置。根据这个原理,用一套扫描装置使传感器在焊道上方左右扫描,实现了超声波波声束的聚焦并将其应用到埋弧焊缝跟踪中,跟踪效果很好。但由于传感器要贴近工件,不可避免地会受到焊接方法和工件尺寸等的严格限制,另外需考虑震动传播时间、外界震动等因素,对金属表面状况要求较高,使其应用范围受到限制。随着传感器技术的不断进步,代表着传感器发展方向的视觉传感器在焊缝跟踪中得到了广泛的应用。因为视觉传感器具有相当于人眼睛的功能,使焊接视觉成为焊接自动化趋向智能化的一个前提条件[7~8]。视觉传感式跟踪系统原理是将视频信号转化为数字图象,经过对图象的处理并转换为模拟信号后,经计算机送往电机控制板以驱动电机转动,控制焊枪移动,调整焊炬准确对准焊缝达到纠偏的目的。视觉传感器不仅能检测出焊缝的中心位置,而且还能获得焊缝截面形状和尺寸等特征参数,并且适用于不同形状的焊缝,是一种较有前途的方法。但是这种方法容易受到焊接飞溅、烟尘、蒸气、电弧闪烁以及工件的铁锈、划痕、记号和氧化皮的影响,视觉传感器有面阵成象和线阵成象两种,当高铬铸铁药芯焊丝焊接区亮度对比不强烈时,若要对焊缝坡口的全貌进行检测,需要有外加光源使焊缝区域的亮度对比增加,因而产生了外加光源式视觉传感器跟踪系统。





在线沟通,请点我在线咨询
咨询热线:
13932952879
客服qq:
3348935707